 |
Department of Mechanical Engineering, College of Science and Engineering, Idaho State University. Pocatello, Idaho, 83209. Phone number: 208-282 5655 email: perealba@isu.edu |
My current research deals with the kinematic synthesis of articulated bodies. I am interested in the use of Clifford algebras for the analysis and synthesis of systems with spatial motion. Specific applications include multi-fingered robotic hands and exoskeletons for rehabilitation and prosthetics.
News and Recent Results
- Check out 2018-2019 research activity at the ISU Robotics Research Lab webpage.
- Research project: ARPRI: Augmented Reality for Interaction with Industrial Robots (2019)
Project in collaboration with House of Design.
![[Scott Hand]](images/ARsystem.jpg)
An AR system to identify industrial robots in the environment and interact with them.
Interactive communication with ABB robots.
See what is going on with this research at the RRL page.
- Course on Advanced Kinematic Synthesis.
Course material available at the ISU Robotics Research Lab webpage.
- Research project: Design of Multi-fingered Robotic Grippers (2012-2017)
Robotic hands are kinematic chains with a tree topology.
![[Scott Hand]](images/3fingersHandObject.jpg)
Hand topologies can be enumerated and synthesized for simultaneous tasks of the fingertips.
The method allows the design of complete arm-wrist-hand systems.
See the results of this research at the project webpage.
- Research project: ARWED: Virtual Reality for Upper-Limb motion (2014-2018)
![[Scott Hand]](images/ARWED1.jpg) An immersive environment with hand motion detection.
An immersive environment with hand motion detection.Upper-limb motion analysis and synthesis.
Rehabilitation with motion reflection for mirror neuron system activation.
Currently being tested at the Dept. of PT/OT.
See the results of this research at the RRL webpage.
![“[VRArttreeks]”](images/VRdesigner.jpg)
As an extension of this project, we are working on a virtual reality environment for mechanical designers.
It combines hand motion tracking with the powerful ArtTreeKS software.
- Link-based Design Optimization
 Several performance properties of spatial mechanisms depend on the location of the links along the joints.
Several performance properties of spatial mechanisms depend on the location of the links along the joints. This link-based method can optimize size, force transmission and obstacle avoidance among other properties.
See details and resources in our RRL webpage.
See also the work of Yimesker Yihun.
- The Scott Hand
![[Scott Hand]](images/ScottHand.jpg) The Scott Hand was designed by MS student Kurt Scott for prosthetic applications (Summer 2013).
The Scott Hand was designed by MS student Kurt Scott for prosthetic applications (Summer 2013).Currently being used for actuation and transmission testing.
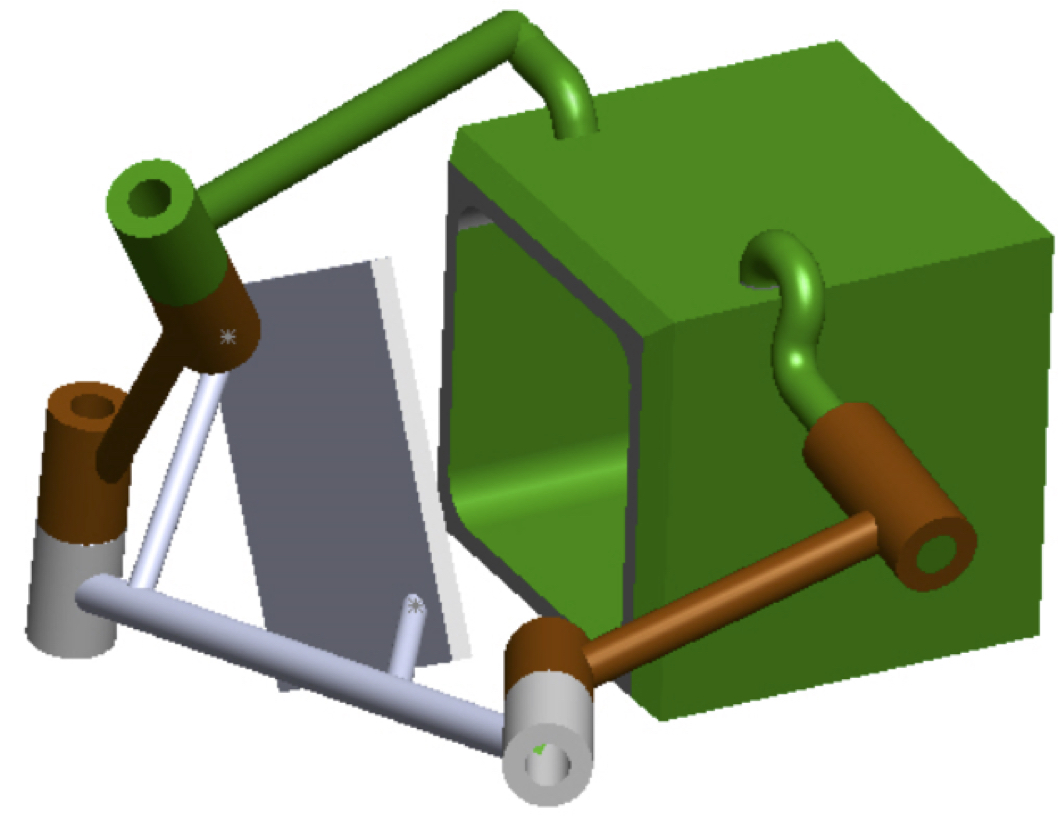
- Exact kinematic synthesis for workspaces
![[RPRP robot]](images/RPRPEx2-10.png)
 For some articulated systems, it is possible to find the explicit formulation of the workspace by using a finite set of positions. The easiest case is that of a mechanism whose workspace forms a screw system.
For some articulated systems, it is possible to find the explicit formulation of the workspace by using a finite set of positions. The easiest case is that of a mechanism whose workspace forms a screw system.
See some of the results at the RRL webpage .
- Clifford Algebras in Kinematics
Several Clifford algebras are very good tools for motion analysis and synthesis.
![[hand robot]](images/fullHand.png)
See also the work of Federico Thomas at the Institut de Robotica i Informatica Industrial (IRI) in Barcelona, Spain.
- Research project: ARPRI: Augmented Reality for Interaction with Industrial Robots (2019)