Project#2: Convex Hull
Background
The
convex hull
of a set
Q
of points is the smallest convex polygon
P
for which each point in
Q
is either on the boundary of
P
or in its interior. To be rigorous, a
polygon
is a piecewise-linear, closed curve in the plane. That is, it is a curve, ending on itself that is formed by a sequence of straight-line segments, called the sides of the polygon. A point joining two consecutive sides is called a
vertex
of the polygon. If the polygon is
simple
, as we shall generally assume, it does not cross itself. The set of points in the plane enclosed by a simple polygon forms the
interior
of the polygon, the set of points on the polygon itself forms its
boundary
, and the set of points surrounding the polygon forms its
exterior
. A simple polygon is
convex
if, given any two points on its boundary or in its interior, all points on the line segment drawn between them are contained in the polygon's boundary or interior.

Divide and Conquer
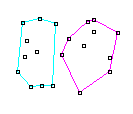
In the divide-and-conquer method for finding the convex hull,
-
The set of
n
points is divided into two subsets,
L
containing the leftmost ⎡n/2⎤ points and
R
containing the rightmost ⎣n/2⎦ points.
-
The convex hulls of the subsets
L
and
R
are computed recursively.
-
Then a clever method is used to combine the hulls:
-
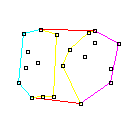
To merge the left hull CH(L) and the right hull CH(R), it is necessary to find the two edges known as the upper and lower common tangents (shown in red below). A common tangent of two simple convex polygons is a line segment in the exterior of both polygons intersecting each polygon at a single vertex. If continued infinitely in either direction, the common tangent would not intersect the interior of either polygon.
-
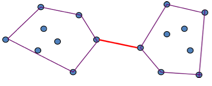
The upper common tangent can be found by scanning around the left hull in a counter-clockwise direction and around the right hull in a clockwise direction. Some guidance with regard to finding the common tangents is given below; although you will need to work out some additional details. The two tangents divide each hull into two pieces. The right edges belonging to the left subset and the left edges belonging to the right subset must be deleted.
The remaining part of the algorithm is a solution for the base case (i.e., the leaves of your recursion). In the example shown above, the final hull appears as follows:

Finding the upper common tangent (finding the lower common tangent is similar):
-
Start with the rightmost point of the left hull and the leftmost point of the right hull
-
While the edge is not upper tangent to both left and right
-
-
While the edge is not upper tangent to the left, move counter-clockwise to the next point on the left hull
-
Hint: We want to move to the next point(s) on the left hull as long as the slope decreases
-
While the edge is not upper tangent to the right, move clockwise to the next point on the right hull
Some Other Hints:
Maintain clockwise (or counter-clockwise) ordering when merging (natural if you start that way). Note below that from one point (e.g. left-most) to each other point, clockwise order will be by decreasing slopes.

Note that you can handle the two base cases (
n
= 2, and
n
=3) by appropriately ordering those simple hulls. But, you can also have a single base case with
n
=1, if you are careful with how you merge hulls, and this might be easier/more elegant.
You need to be careful when accessing your hull data structure since it is really a circular list. If using an array then make sure indexes properly change between the 0 element and the last element when you are moving either clockwise or counter-clockwise through the array.
I have created a walkthrough video that shows an example worked through by hand here. You should work through problems similar to this for your project design experience.
Applications
More generally beyond two dimensions, the convex hull for a set of points
Q
in a real vector space
V
is the minimal convex set containing
Q
.
Algorithms for some other computational geometry problems start by computing a convex hull. Consider, for example, the two-dimensional farthest-pair problem: we are given a set of n points in the plane and wish to find the two points whose distance from each other is maximum. This pair is also referred to as the diameter of the set of points. You can prove that these two points must be vertices of the convex hull.
The problem of finding convex hulls also finds its practical applications in pattern recognition, image processing, statistics and GIS.
Provided Framework
We provide a
framework
in Python to get you started and allow you to focus on the primary tasks of the project. In the framework you will find:
-
A Graphical User Interface that generates a specified number of random points. The software has been built so that no two points should have the same
x
value, though there could be duplicate
y
values. This just makes life a little easier, as otherwise you would have to make sure your software properly deals with duplicate
x
value points. The GUI is provided in the file
Proj2GUI.py
.
-
A hook (the "Solve" button) which calls the method that you are going to implement. If you look in the file
convex_hull.py
, you will find three parts of the
compute_hull()
method that you need to implement. First, you will need to sort the list of points (
QPointF
objects) by ascending x-value. You may use a built-in sort function rather than implementing one yourself. (NOTE: this initial sort is simply for purposes of dividing up subproblems appropriately. As described below, you will want to use a different ordering in the list of points that is returned as the hull solution.) Next you will implement the divide and conquer algorithm described above (you may create other methods and/or classes if you wish to do this). Last, you will pass a list of
QLineF
objects representing the segments on the convex hull to the GUI for display (see "dummy" example provided with the code).
To Do
-
Write the full, unambiguous pseudo-code for your divide-and-conquer algorithm for finding the convex hull of a set of points
Q
. Be sure to label the parts of your algorithm. Also, label each part with its worst-case time efficiency.
-
Analyze the whole algorithm for its worst-case time efficiency. State the Big-O asymptotic bound. Discuss how this relates to the Master Theorem estimate for runtime.
-
Implement your divide and conquer algorithm in Python in the following method:
-
ConvexHullSolver.compute_hull( self, unsorted_points )
-
Use the divide and conquer algorithm from step #1 to find the convex hull of the points in pointList.
-
You may use the GUI method
addLines()
to draw the line segments of the convex hull on the UI once you have identified them.
-
Conduct an empirical analysis of your algorithm by running several experiments as follows:
-
For each value
n
∈ {10, 100, 1000, 10,000, 100,000, 500,000, 1,000,000}
-
Generate 5 sets of
n
points (
x
,
y
) in the plane. You may use either provided point generator: the 2-D Gaussian (Normal) distribution or the uniform distribution. For every point,
x
and
y
are real numbers (doubles). You may use the provided project scaffold code to assist you.
-
For each point set,
-
find the convex hull
-
record the elapsed time
-
For each size
n
, compute the mean time
t
required.
-
Plot
n
(independent variable) versus
t
(dependent variable). Note that if you use a logarithmic graph to fit the data (preferable) then that may change the expected shape of your distribution. Make sure you explain that.
-
Find the relation of your plot to your theoretical analysis. In other words, if your theoretical analysis says that for a set of
n
points
Q
, the convex hull CH(
Q
) ∈ O(
g
(
n
)), does
g
(
n
) actually fit your empirical data? If so, what is the constant of proportionality
k
so that CH(
Q
) =
k
·
g
(
n
)? If not, then which function
g
(
n
) best fits your empirical data, and what is the constant of proportionality? You can fit a function analytically using software or by trial and error in a spreadsheet, for example.
-
If your theoretical and empirical analyses differ, discuss the reason(s) for the difference.
Report
Submit a type-written report with the following sections as a single PDF document. Points are shown in brackets.
-
[40] Correct functioning code to solve the Convex Hull problem using the divide and conquer scheme discussed above. Include your documented source code.
-
[15] Include the full, unambiguous pseudo-code for your divide-and-conquer algorithm for finding the convex hull of a set of points Q. Explain the time and space complexity of your algorithm by showing and summing up the complexity of each subsection of your pseudo-code. Also, include your theoretical analysis for the entire algorithm including discussion of the recurrence relation.
-
[15] Include your raw and mean experimental outcomes, plot, and your discussion of the pattern in your plot. Which order of growth fits best? Give an estimate of the constant of proportionality. Include all work and explain your assumptions.
-
[10] Discuss and explain your observations with your theoretical and empirical analyses, including any differences seen.
-
[10] Include a correct screenshot of an example with 100 points and a screenshot of an example with 1000 points. You can capture the image of the window using the
ctrl-alt-shift-PrtSc
facility for capturing an image of the window in focus.
Further Exploration
Here are (some non-exhaustive) suggestions for possible algorithmic improvements. Implement another algorithm for computing the convex hull, CH(Q). Conduct a similar theoretical and empirical analysis to determine how your new algorithm compares with the divide-and-conquer algorithm.Possibilities include:
-
the incremental method (see p. 948 of Cormen et al.)
-
the prune-and-search method (also see p. 948 of Cormen et al.)
-
Graham’s scan (p. 949 of Cormen et al.)
-
Jarvis’s march (using a technique known as “package wrapping” or “gift wrapping”) (see p. 955 of Cormen et al.).
You may find that beyond your algorithmic improvement, animating your algorithm will reveal interesting properties of the nature and efficiency of your algorithm.
Acknowledgements
Adapted from Cormen, Leiserson, Rivest, & Stein.
Introduction to Algorithms
. Second Edition. MIT Press. 2001. pp. 939, 947-947. Additional input from the Wikipedia article titled "Convex hull". Some figures from Tim Lambert of the University of New South Wales (UNSW).