Project
#3: Network Routing
Overview
In this project you will implement Dijkstra’s algorithm to find paths through a graph representing a network routing problem.Goals
- Understand Dijkstra’s algorithm in the context of a real world problem.
- Implement a priority queue with worst-case logarithmic operations.
- Compare two different priority queue data structures for implementing Dijkstra’s and empirically verify their differences.
- Understand the importance of proper data structures/implementations to gain the full efficiency potential of algorithms.
Provided Framework
The Python framework is found here. It provides
- A graphical user interface that generates a graph/network with a specified number of points, for a provided random seed
- A display for the graph vertices and for the subsequently computed shortest paths

When you hit “Generate” the framework for this project generates a random set of nodes, V, each with 3 randomly selected edges to other nodes. The edges are directed and the edge cost is the Euclidean distance between the nodes. Thus all nodes will have an out-degree of 3, but no predictable value for in-degree. You will be passed a graph structure which is comprised of |V| nodes, each with 3 edges, thus |E| = 3 |V| = O(|V|). The nodes have an (x,y) location and the edges include the start/end nodes and the edge length. The nodes are drawn on the display in the provided framework. You can hit “Generate” again to build a new graph (if you change the random seed).
After generating, clicking on a node (or entering its index in the appropriate box) will highlight the source in green, and clicking another (or, again entering its index in the box) will highlight the destination in red. Each click alternates between the two. After these nodes are selected you can hit “Compute”, and your code should draw the shortest path starting from the source node and following all intermediate nodes until the destination node. Next to each edge between two nodes, display the cost of that segment of the route. Also, in the "Total Path Cost" box, display the total path cost. If the destination cannot be reached from the source then put “unreachable” in the total cost box. Clicking on the screen again will clear the current path while allowing you to set another source/destination pair.
The “Compute” button should (potentially) call two different versions of Dijkstra’s, one that uses an array to implement the priority queue, and one that uses a heap. (Use the standard Dijkstra's algorithm from the text which puts all nodes initially in the queue and finds the shortest path from the source node to all nodes in the network; after running that, then you just need to show the path from the source to the destination.) Both versions should give you the same path cost. While both versions have the same "high-level" big-O complexity for the graphs they generate, they will differ significantly in their runtime (why?). Each time you hit solve and show a path, display the time required for each version, and the times speedup of the heap implementation over the array implementation.
You will note in the code that there is both a
getShortestPath
and a computeShortestPaths
function. The latter function is where you run Dijkstra's algorithm (using either the heap or the array) to find the shortest path from the source to any node. The former function then asks you to return the path from the source to a particular destination. For this reason, the latter function does not have a reference to the destination index and the former function has no parameter to indicate whether or not you should use the heap. Both functions are called (only) by the GUI class, requiring the NetworkRoutingSolver to store the results of the computeShortestPaths
function for reference when the getShortestPath
function is called.
To make sure everything is working correctly, first try some smaller problems that you can solve by hand. Also, at the top of this page, we have included a screen shot for a particular 2000-vertex problem, which you can use as a debug check to help ensure your code is working correctly, and, at the bottom, there are an additional couple of1000-vertex problems you can use for further comparison with your results.
Note that here, since each node has a predefined maximum out-degree, O(|E|) = O(|V|), so in your analysis you can use O(|V|) in place of O(|E|).
Note that in a stable network, a node could just run Dijkstra’s once for every node in the network and set up a routing table which it could then use for any message. However, for unstable networks (new nodes, outages, etc.) such a table would not necessarily be correct for very long.
To Do
- Implement Dijkstra’s algorithm to find shortest paths in a graph.
- Implement two versions of a priority queue class, one using an unsorted array (a python list) as the data structure and one using a heap.
- For the array implementation, insert and decrease-key are simple O(1) operations, but delete-min will unavoidably be O(|V|).
- For the heap implementation, all three operations (insert, delete-min, and decrease-key) should be worst case O(log|V|). For your binary heap implementation, you may implement the binary heap with an array, but also remember that decrease-key will be O(|V|) unless you have a separate array (or map) of object references into your binary heap, so that you can have fast access to an arbitrary node. Also, don't forget that you will need to adjust this lookup array/map of references every time you swap elements in the heap. (This was not discussed in detail in class, but you can figure it out.)
Just to be clear, you may NOT use an existing heap implementation. You must implement both versions of the priority queue from scratch.
Report
Submit a typed report in PDF format with the following information.
- [20] Correctly implement Dijkstra’s algorithm and the functionality discussed above. Include a copy of your (well-documented) code in your submission to the TA.
- [20] Correctly implement both versions of a priority queue, one using an array with worst case O(1), O(1) and O(|V|) operations and one using a heap with worst case O(log|V|) operations. For each operation (insert, delete-min, and decrease-key) convince us (refer to your included code) that the complexity is what is required here.
- [10 points] Explain the time and space complexity of both implementations of the algorithm by showing and summing up the complexity of each subsection of your code.
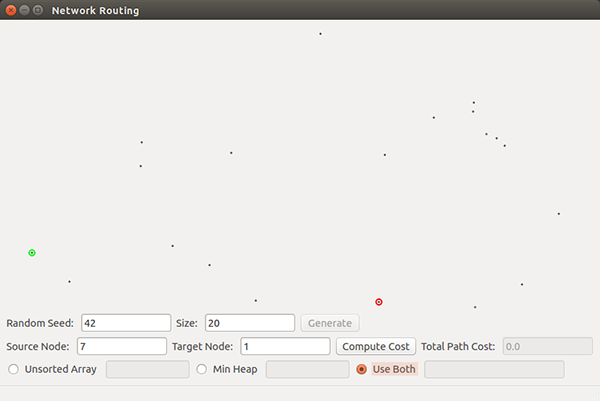
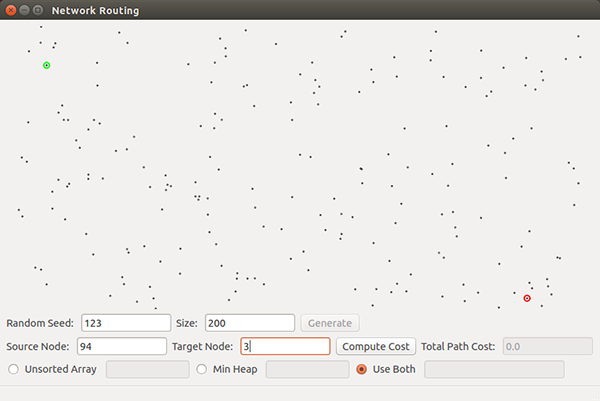
- [20] For Random seed 42 - Size 20, Random Seed 123 - Size 200 and Random Seed 312 - Size 500, submit a screenshot showing the shortest path (if one exists) for each of the three source-destination pairs, as shown in the images below.
- For Random seed 42 - Size 20, use node 7 (the left-most node) as the source and node 1 (on the bottom toward the right) as the destination, as in the first image below.
- For Random seed 123 - Size 200, use node 94 (near the upper left) as the source and node 3 (near the lower right) as the destination, as in the second image below.
- For Random seed 312 - Size 500, use node 2 (near the lower left) as the source and node 8 (near the upper right) as the destination, as in the third image below.
- [20] For different numbers of nodes (100, 1000, 10000, 100000, 1000000), compare the empirical time complexity for Array vs. Heap, and give your best estimate of the difference (for 1000000 nodes, run only the heap version and then estimate how long you might expect your array version to run based on your other results). For each number of nodes do at least 5 tests with different random seeds, and average the results. Redo any case where the destination is unreachable. Each time, start with nodes approximately in opposite corners of the network. Graph your results and also give a table of your raw data (data for each of the runs); in both graph and table, include your one estimated runtime (array implementation for 1000000 points). Discuss the results and give your best explanations of why they turned out as they did.
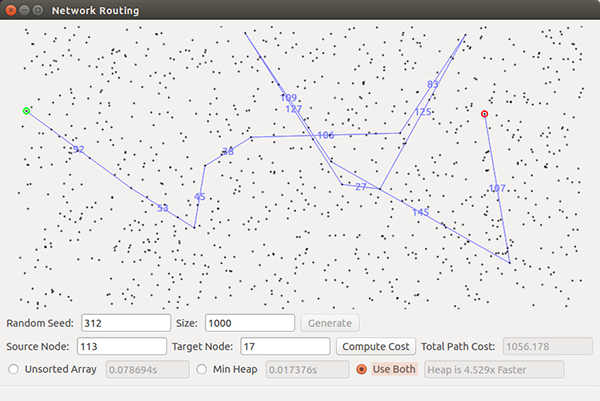
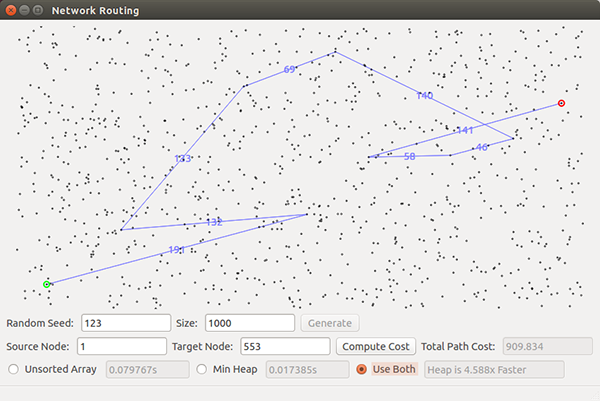
A couple of other examples of expected output...