Research
|
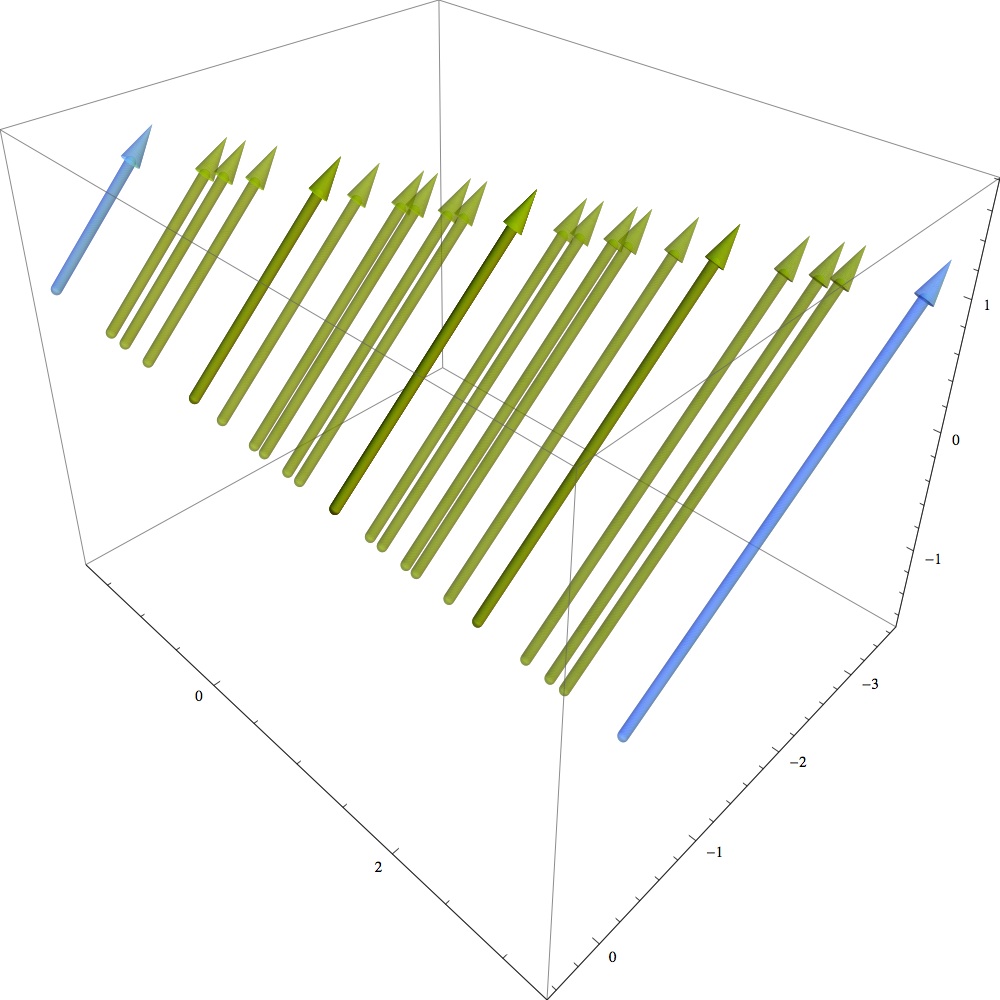
Exact kinematic synthesis for workspaces For those linkages whose workspace can be expressed as a linear system, it is easy to span the whole workspace by using a set of generators. Performing finite-position kinematic synthesis using these generators allows for the complete description of the workspace as the input for the synthesis process. This method has been applied to the RPRP overconstrained linkage. Its application to the RCCR linkage is being explored. Some information about this project: - Perez-Gracia, A., "Synthesis of Spatial RPRP Closed Linkages for a Given Screw System", ASME Journal of Mechanisms and Robotics, 2011. - Create the workspace of screws corresponding to relative displacements and perform the dimensional synthesis. |
|
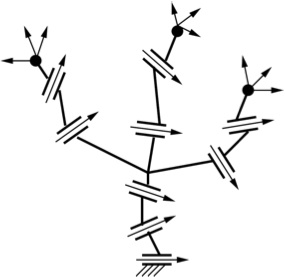
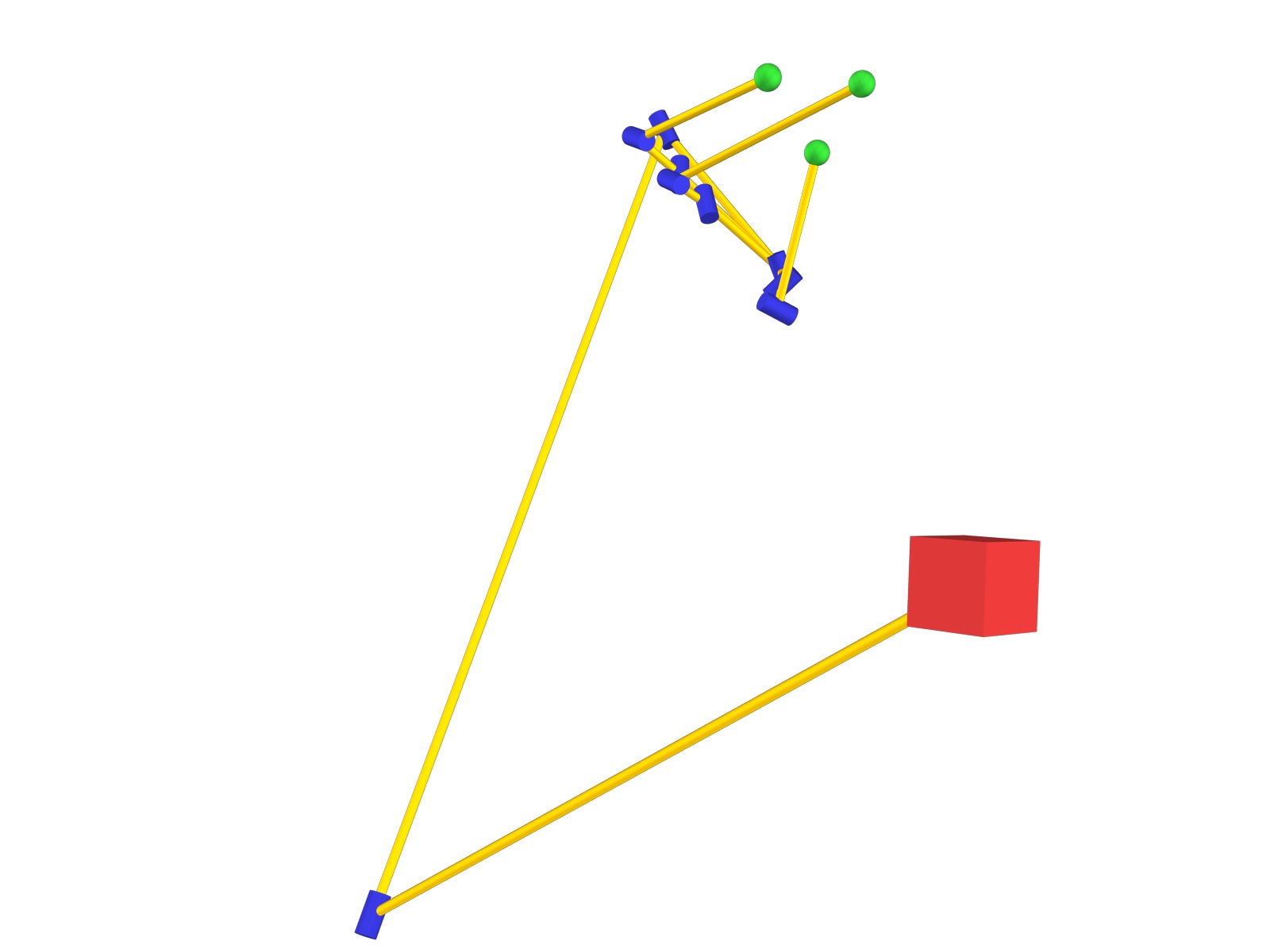
Kinematic Synthesis of Tree-like Articulated Chains Articulated systems with a tree structure appear naturally when grasping and manipulation are involved; the best example are multi-fingered robotic hands. We are developing a synthesis theory for these kinematic chains. New issues and results appear when dealing with them. For instance, we can do exact synthesis for serial chains with more than six joints. This method is being developed with Edgar Simo-Serra at the IRI Robotics Institute in Barcelona, Spain. Some information about this project: - Simo-Serra, E., Moreno-Noguer, F. and Perez-Gracia, A., "Design of Non-anthropomorphic Robotic Hands for Anthropomorphic Tasks", ASME IDETC/CIE 2011 Conference, 2011. |
|
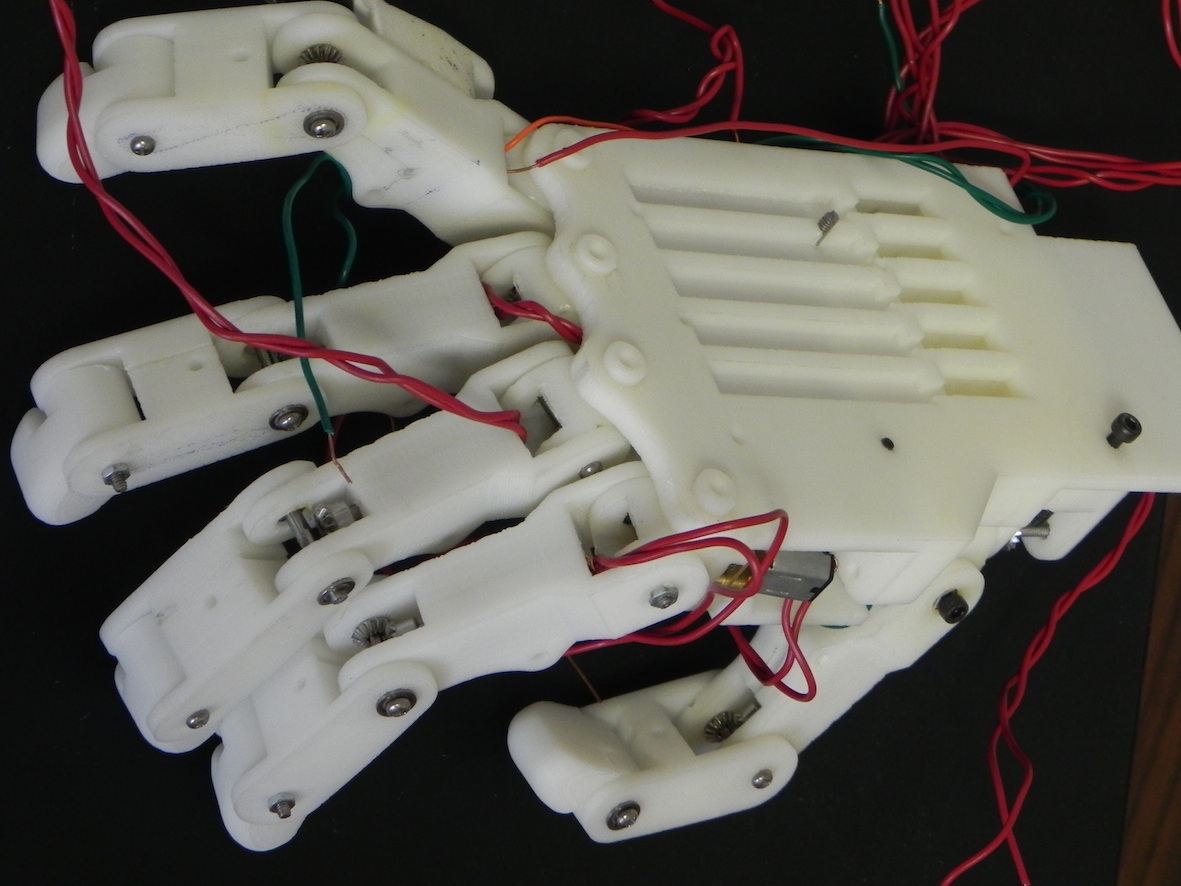
Smart Prosthetic Hand Project The Smart Prosthetic Hand is a multi-disciplinary project with researchers from the School of Engineering, the Department of Physical Therapy and the College of Pharmacy at Idaho State University. The aim is to develop a highly functional prosthetic hand driven by EMG signals. The robotics team has been developing the prototype prosthetic hand and the method to capture and analyze hand motion. Some information about this project: - Crawford, A.L. and Perez-Gracia, A., "Design of a Robotic Hand with a Biologically-Inspired Parallel Actuation System for Prosthetic Applications", Proc. of the ASME 2010 IDETC/CIE Conferences, Montreal, Quebec, Canada, August 15-18, 2010. |
|
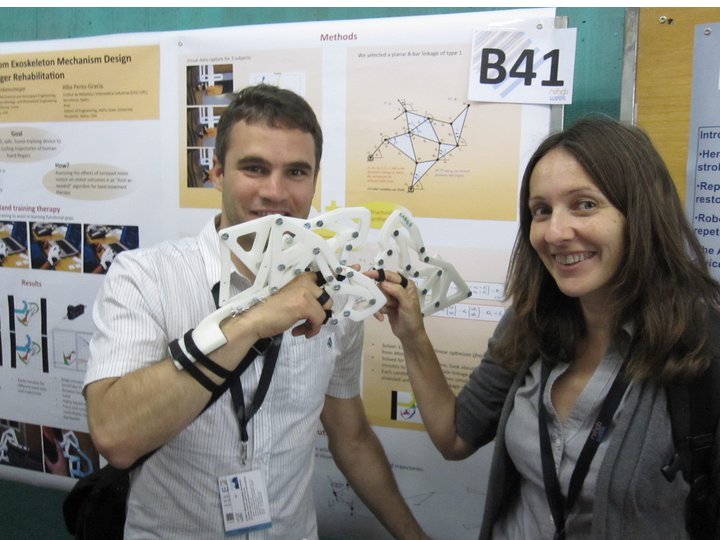
Design of a Finger Rehabilitation Device I am collaborating with Eric Wolbrecth at University of Idaho and David Reinkensmeyer at University of California, Irvine in the development of an exoskeleton for finger-thumb rehabilitation. There is an adaptable prototype for the finger motion, the thumb exoskeleton is under development. Some information about this project: - Wolbrecht, E.T., Reinkensmeyer, D.J., and Perez-Gracia, A., "Single Degree-of-Freedom Exoskeleton Mechanism Design for Finger and Thumb Rehabilitation", Proceedings of the ICORR 2011, Zurich, Switzerland, June 29-July 1, 2011. |
|
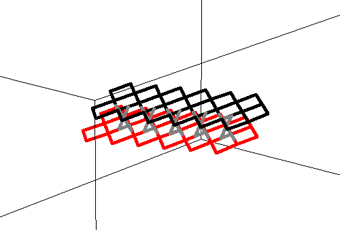
Network mechanisms Network mechanisms with one degree of freedom can be created using parallel overconstrained spatial and planar linkages. In particular, we have studied the simplest closed linkage, composed of four revolute joints, which is movable only in three particular cases: planar four-bar linkage, spherical four-bar linkage and Bennett linkage. We have created some movable structures using a homogeneous network of Bennett linkages and heterogeneous networks of both Bennett and planar four-bar linkages. Some information about this project: - Isaak, R., "A Study of Overconstrained Linkage Networks", Master's Thesis, College of Engineering, Idaho State University, June, 2006. - Construct and visualize a Bennett's linkage. |
|
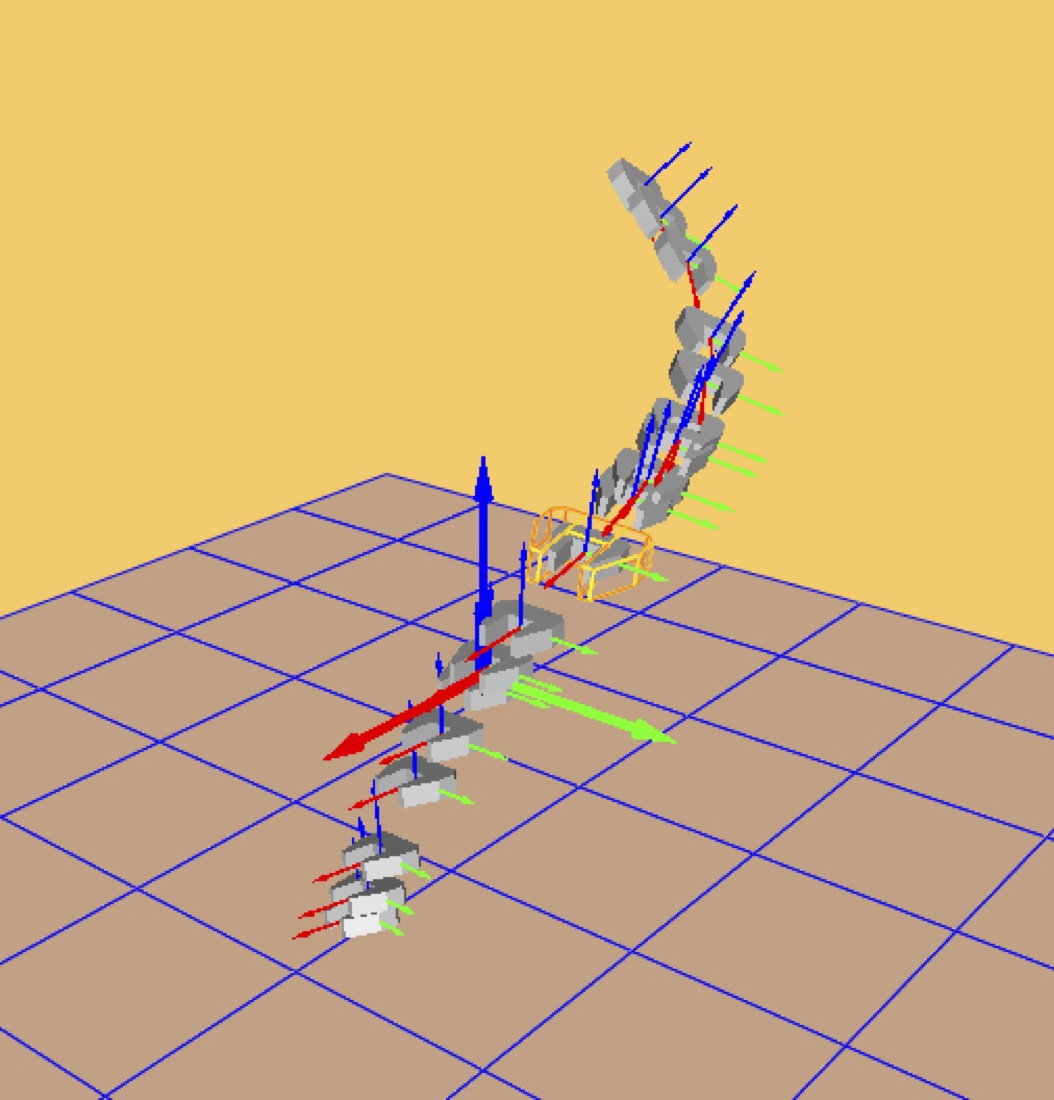
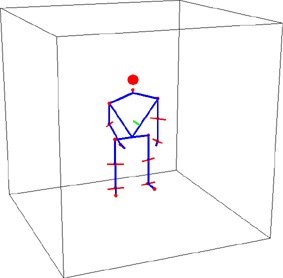
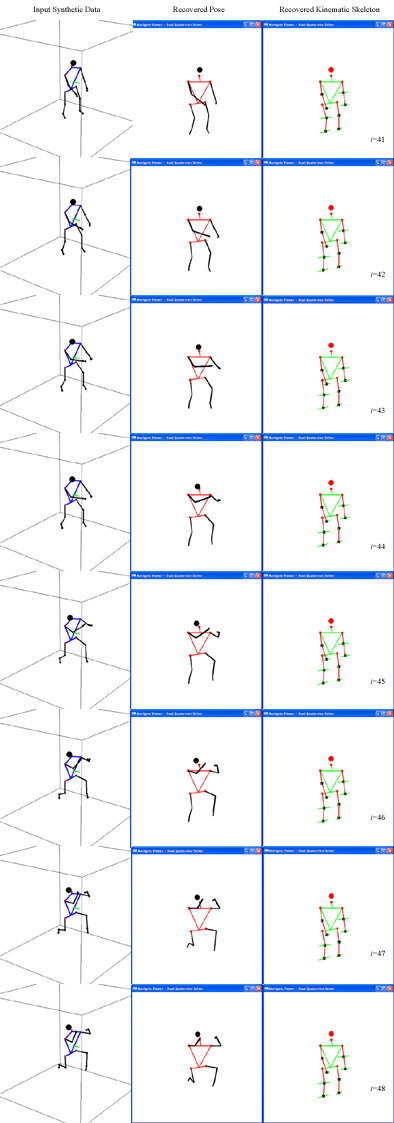
Kinematic identification of structures from visual data - We applied the dual quaternion synthesis theory to identify the kinematic structure underlying moving images. Graphic data from human subjects can be used to identify the kinematic skeleton. This may be used to create a 3d movable avatar representing the subject. This research was developed as a main researcher by Mari Cruz Villa Uriol, at the Department of Electrical Engineering and Computer Science at the University of California, Irvine. - Current research project in the same direction involves the identification of human hand motion |
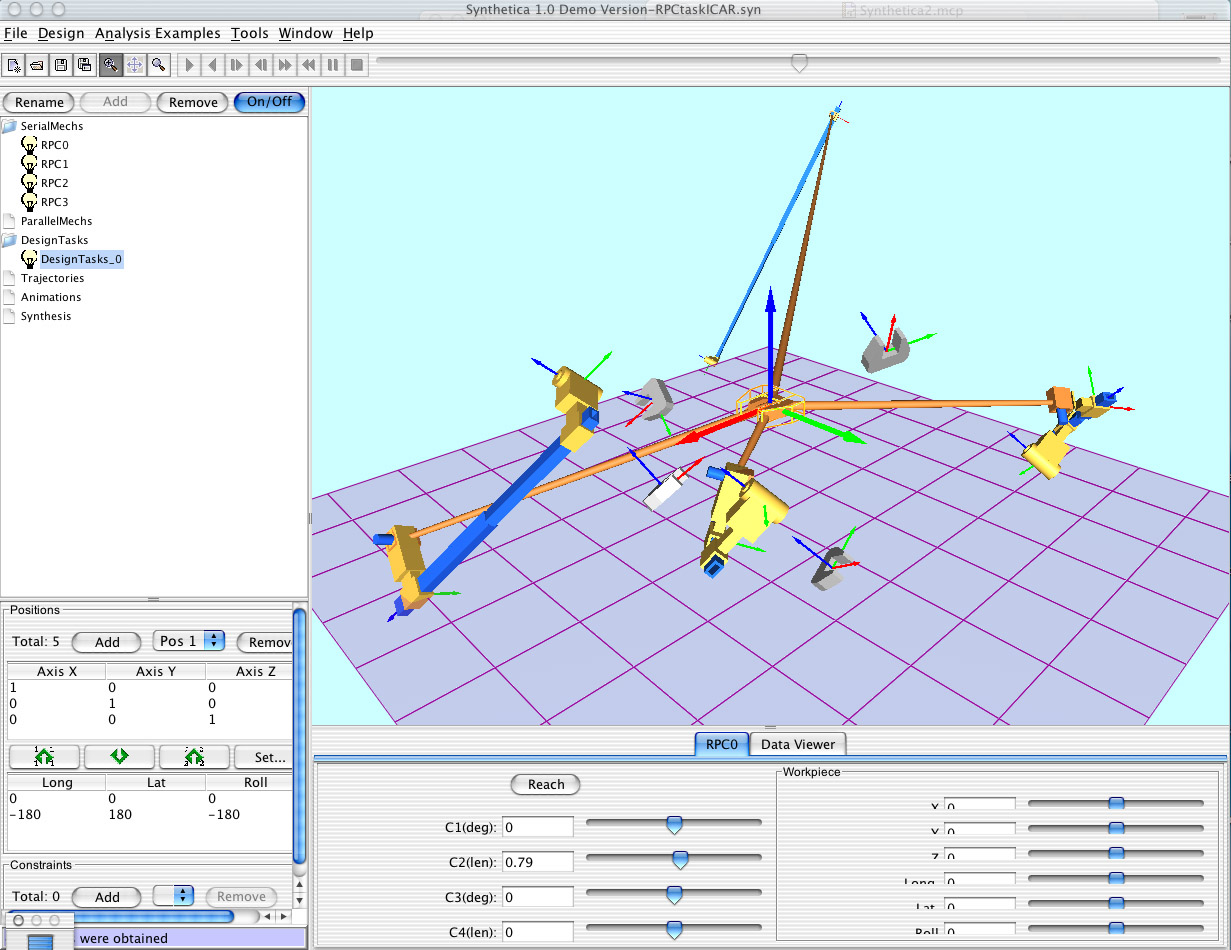
Implementation in Synthetica1.0 of the dual quaternion synthesis for the RPC robot (Main developer of the Synthetica software: Hai Jun Su). |
Dual quaternion synthesis of constrained serial robots |